Creo que es porque eres aun muy nuevo en este foro
Si quieres poner aquí tu email por mi no hay problemas ... supongo que si lo pones tu no hay peligro de estar incumpliendo alguna normativa
Raspberry e híbrido tipo axpert
Versión para imprimir
- 06/06/2019, 00:06MleonRe: Raspberry e híbrido tipo axpert
- 06/06/2019, 07:17estrugaRe: Raspberry e híbrido tipo axpert
Pues ahí va
estruga[arroba]etlgr.com - 06/06/2019, 23:24MleonRe: Raspberry e híbrido tipo axpert
pues debería haberte llegado la invitación
- 07/07/2019, 19:43rmonteRe: Raspberry e híbrido tipo axpert
Buenas
He estado siguiendo la guia para la adaptacion de mi rapberry 3 mas al llegar al punto de gravar la aplicación no se donde se descargan los archivos de pvcontrol+.
Tambien queria saber si alguien intento hacer com un inversor MUST, similares carecteristicas que el axpert
mc - 09/07/2019, 23:37jojolo03Re: Raspberry e híbrido tipo axpert
Buenas noches Mleon estoy intentando instalar el software de Control PV pero no lo encuentro por ningún lado.
Me preguntaba si como he leído varias tan amable de darme el enlace en Google Drive. Estoy en un callejón sin salida y me gustaría monitorizar mi Axpert.
Gracias y un saludo. - 10/07/2019, 17:19MleonRe: Raspberry e híbrido tipo axpertHola.. perdona estoy de viajeCita:
Iniciado por rmonte
Mandame por privado tu email para darte acceso al disco de Gdrive - 11/07/2019, 03:43rmonteRe: Raspberry e híbrido tipo axpertDonde te envio un mensaje privado , no deveria salir clicando tu nick?Cita:
Iniciado por Mleon
saludos - 11/07/2019, 10:00PhotonRe: Raspberry e híbrido tipo axpert
Hasta no alcanzar los 5 mensajes no puedes enviar un privado a nadie, ni recibir.
- 12/07/2019, 09:01plasrerRe: Raspberry e híbrido tipo axpert
buff hola chicos yo tambien tengo un hibrido al cual me gustaria poder estraer los datos para poder ver como trabaja durante todo el dia.
si me podeis dar el enlace para la descarga os lo agradeceria. - 12/07/2019, 10:04ministropeponRe: Raspberry e híbrido tipo axpert
Quizá ya hay algo así y me estoy colando, pero no sería útil un repositorio en GitHub para cosas compartidas del foro?
Un saludo
Enviado desde mi SM-G930F mediante Tapatalk - 12/07/2019, 23:39MleonRe: Raspberry e híbrido tipo axpertla imagen de la microSD la tengo en un disco de gdrive por lo que me tendrias que pasar tu email para darte accesoCita:
Iniciado por plasrer
- - - - - - - - - - - - - - - - - - -
Pues supongo que si seria bueno, pero todo eso lleva tiempo, organizarlo bien, etcCita:
Iniciado por ministropepon
Por ahora lo tenemos en un disco de gdrive - 14/07/2019, 21:46rmonteRe: Raspberry e híbrido tipo axpert
Buenas
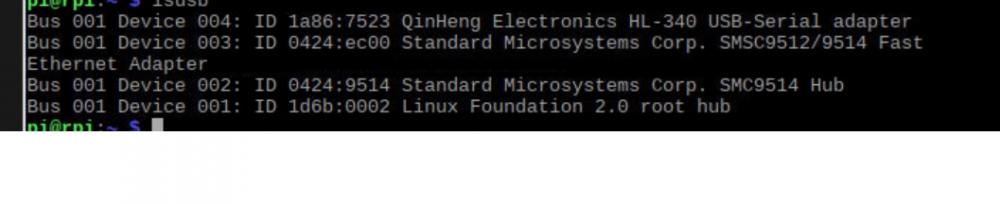
He estado trabajando com la imagen de raspberry y no consigo recibir dados del hibrido si hago lsusb
Archivo adjunto 20565
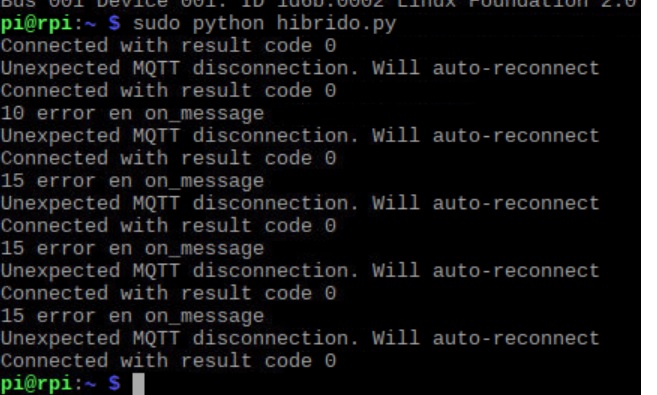
si hago sudo python hibrido py ttyusb0
Archivo adjunto 20564
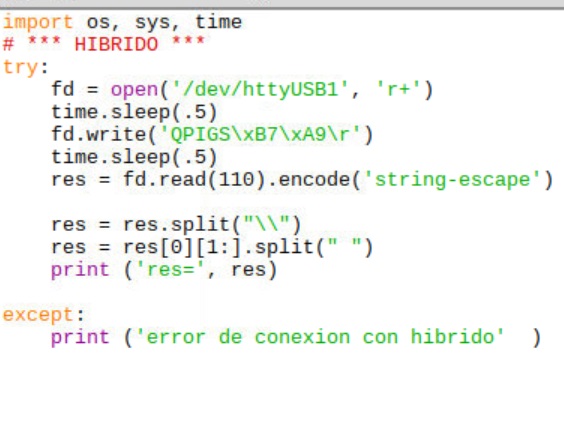
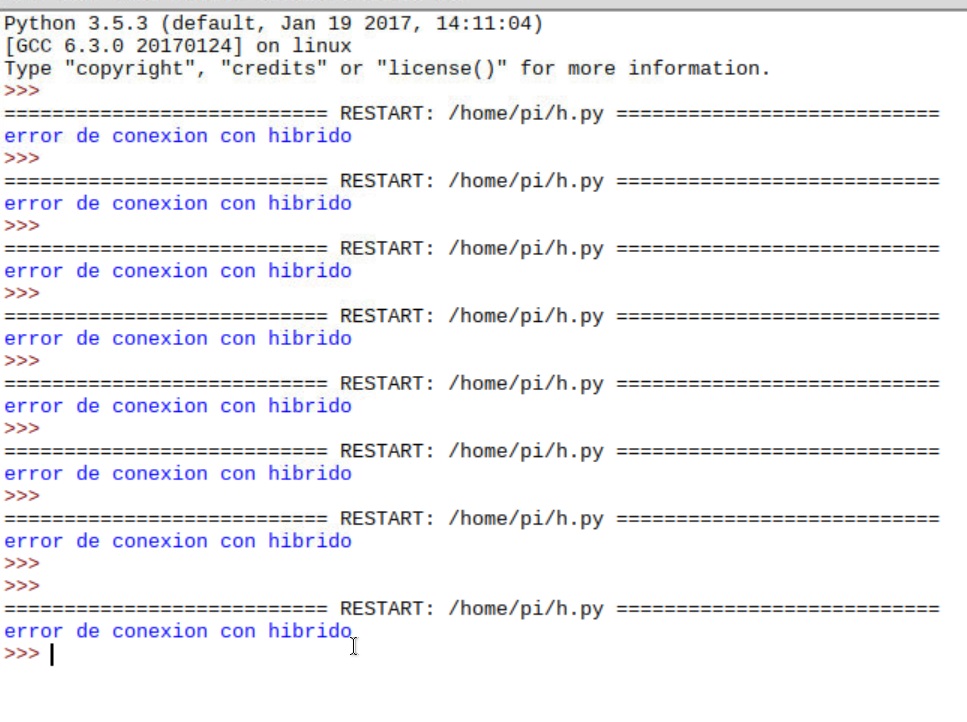
si hago el programa sencillo que pusisteis
Archivo adjunto 20567
me sale esto
Archivo adjunto 20566
entiendo que no consigo comunicar con el inversor - 15/07/2019, 00:07MleonRe: Raspberry e híbrido tipo axpertNo reconozco bien cual seria el Hibrido, supongo que el primero... que modelo de Hibrido tienes?Cita:
Iniciado por rmonte
Dos temasCita:
Iniciado por rmonte
A) Las desconexiones MQTT se producen porque no has parado el servicio que se inicia al arrancar la raspberry denominado "hibrido", y por tanto tenias dos programas iguales intentando conectarse al broker MQTT
Para ver como esta el servicio... sudo systemctl status hibrido
Para pararlo........................... sudo systemctl stop hibrido
Para arrancarlo ...................... sudo systemctl start hibrido
etc
Luego siempre parar antes el servicio hibrido para ejecutar por terminal hibrido.py
B) Direccionamiento hacia el Hibrido
En todos los Hibridos que he visto hasta la fecha lo que se usa es '/dev/hidraw0', cambiando el último 0 por 1, 2, ... dependiendo de las cosas que tengas enchufadas a la raspberry
Así, por ejemplo en el archivo de configuración Parametros_FV.py por defecto viene así:
Por que pones ....'/dev/hTTYUSB1' ??Código:dev_hibrido ='/dev/hidraw0'
Pues lo mismo del comentario anterior... no veo lo de poner '/dev/hTTYUSB1'Cita:
Iniciado por rmonte
- 15/07/2019, 02:04rmonteRe: Raspberry e híbrido tipo axpertsi, solo tenia conetado el inversor al usb, Es el must de 5000 PV18-5048HM esta conectado directamente puerto USB.Cita:
Iniciado por Mleon
es error de teclado , "/dev/ttyUSB0",Cita:
Iniciado por
B) Direccionamiento hacia el Hibrido
En todos los Hibridos que he visto hasta la fecha lo que se usa es '/dev/hidraw0', cambiando el último 0 por 1, 2, ... dependiendo de las cosas que tengas enchufadas a la raspberry
Así, por ejemplo en el archivo de configuración Parametros_FV.py por defecto viene así:
[CODE
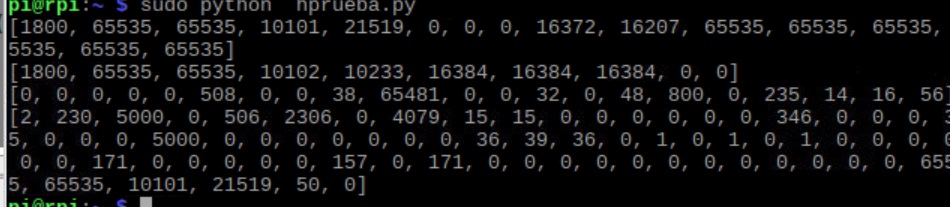
pongo ese por que con este codigo si que consegui que respondiera
import time
from pymodbus.client.sync import ModbusSerialClient as ModbusClient
modbus = ModbusClient(method='rtu', port='/dev/ttyUSB0', baudrate=19200, timeout=1)
modbus.connect()
r = modbus.read_holding_registers(20001, 16, unit=4)
print r.registers
time.sleep(1)
r = modbus.read_holding_registers(10001, 10, unit=4)
print r.registers
time.sleep(1)
r = modbus.read_holding_registers(15201, 21, unit=4)
print r.registers
time.sleep(1)
r = modbus.read_holding_registers(25201, 74, unit=4)
print r.registers
me da esto
Archivo adjunto 20568 - 15/07/2019, 10:09MleonRe: Raspberry e híbrido tipo axpert
Parece claro que el protocolo de comunicaciones de tu Hibrido Must no es el mismo que el del Hibrido Axpert
Obviamente debes adaptar el archivo hibrido.py para el protocolo que usa tu Hibrido
Tienes el documento que explique los distintos comandos que le puedes mandar por modbus y que es lo que responde?
Del programilla que has puesto quizas se pueda deducir que significan las respuestas, pero esta claro que lo logico es tener el documento donde se explique - 15/07/2019, 14:41rmonteRe: Raspberry e híbrido tipo axpertYo tome la informacion de este hilo https://www.solarweb.net/forosolar/f...rs485-usb.htmlCita:
Iniciado por Mleon
voy a ver si adelataron algo mas
mc - 01/08/2019, 17:39restaunRe: Raspberry e híbrido tipo axpert
Hola.
Una pregunta si como usuario de windows. ¿Se podria realizar todo esto en lo nuevo de subsistema linux de windows?
He intentado empezar con lsusb y no me responde nada. - 01/08/2019, 18:11TejotaRe: Raspberry e híbrido tipo axpertQue es un subsistema linux de windows??Cita:
Iniciado por restaun
lsusb es un comando de llamada especifico de linux que accede a info del hardware USB directamente.
lsusb solo te funcionara en linux nativos sea en arquitecturas x86, arm, etc.... si hay windows por medio me da que no va a funcionar. - 01/08/2019, 18:18restaunRe: Raspberry e híbrido tipo axpertWSL integra un entorno GNU/Linux completamente funcional sobre Windows 10. Nos ofrece la posibilidad de instalar una distribución completa o básica para tareas o desarrollos que solo requieren del shell y poco mas. Para que esto funcione no se hace uso de la virtualización si no que mas bien se van traduciendo en tiempo real las llamadas al sistema. Se implementa la API del kernel Linux usando la API nativa de Windows NT. Algo parecido a lo que hace WINE en un sistema GNU/Linux, pero se podría decir que a la inversa. Se considera que de esta manera funciona de forma nativa, aunque con algunas limitaciones. O algo asi.Cita:
Iniciado por Tejota
- 01/08/2019, 18:28TejotaRe: Raspberry e híbrido tipo axpertPues entonces no creo que funcione ese comando ya que accede directamente al hardware y eso la API de guindos no lo permitira. Otros comandos que invoquen niveles superiores si pero llamadas a tan bajo nivel como el lsusb no.Cita:
Iniciado por restaun
Yo no me complicaria la vida y me agenciaria una raspberry.... es mucho mas versatil para estas cosas que un pc con guindos. - 02/08/2019, 10:01MleonRe: Raspberry e híbrido tipo axpert
El programa de lectura del hibrido esta hecho en Python luego se puede ejecutar directamente en cualquier entorno (Linux, Windows..)
Logicamente hay que decirle como "ve" el Sistema Operativo el puerto de comunicaciones del Hibrido
En el caso de la RPi conectada por USB al puerto USB del Hibrido se direcciona con /dev/hidraw0 (el digito 0 puede cambiar a 1, 2 etc dependiendo de las cosas que se tengan conectadas a la RPi)
Por tanto, lo primero seria buscar como direccionar al puerto de comunicaciones para poder abrirlo y mandarle los comandos y leer la respuesta
Dado que lo normal es dejarlo conectado y funcionando siempre, si parece logico usar algo tipo RPi en lugar de un PC windows (menor tamaño, consumo, etc)
Un saludo - 03/08/2019, 16:25TejotaRe: Raspberry e híbrido tipo axpertEn guindos no hay /dev/hidraw0 El Sr. Puertas eso lo deja para los drivers. No tienes mas que ver que cualquier cosa que le enchufes a un guindos necesita de un driver del fabricante y desde w7 o antes con las firmas autorizadas correspondientes. Quizas con el driver que usa el watchpower/solarpower de guindos se podria haciendole las llamadas pertinentes.Cita:
Iniciado por Mleon
Demasiado jaleo.... mejor un linux en la plataforma que sea y se acabaron todas las barreras del Sr. Puertas. - 03/08/2019, 18:57ministropeponRe: Raspberry e híbrido tipo axpert
Evidentemente más fácil y práctico con una Rasberry y Rasbian o cualquier otra distribución linux.
En windows, suponiendo que no requiera driver adicional, creará un dispositivo COMX, supongo... no lo sé con seguridad.
Si genera un puerto COM1 (por ejemplo) se podrá modificar el programa python para que lo abra y lea igual que el /dev/hidraw0.
Pero vamos, son conjeturas y yo también apuesto por un linux en una Rasberry o algo parecido: más práctico y consumirá menos que cualquier solución de 32/64bits i486(intel) que usa Windows. - 03/08/2019, 20:14TejotaRe: Raspberry e híbrido tipo axpertSi conectas el pc con guindos al usb del hibrido no es un puerto COM. Esa conexion al hibrido es un HID nativo, como si fuera un mouse o teclado y necesita driver si o si.Cita:
Iniciado por ministropepon
La forma de no necesitar driver seria por un COM nativo como es la conexion por RJ45 del hibrido.
Solo tendria que conectar el pc de guindos saliendo por un USB, transformar esa conexion en serie con la electronica necesaria y conectarla al RJ45 del hibrido. De hecho yo tengo esa conversion en todas las conexiones a mis hibridos. No uso el puerto USB del hibrido y lo hago todo por los RJ45. Me evito pasar por el HID del hibrido con su Cypress y sus "problemas".
Al final las conversiones que hace tanto el HID como el RJ45 del hibrido es para acabar en un TTL puro y duro a la placa de control. Asi que mejor irse por el camino mas facil que es el RJ45. - 20/08/2019, 15:36JORDIRRRe: Raspberry e híbrido tipo axpert
buenas, tengo una instalacion de 24v con un hibrido titpo axpert , y quisiera que me dierais acceso para descargarle elprogrma y poer monitorizraciar la instalcion , tengo una raspbery pi 3 ,
gracias a todos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}